Reinforcement Learning has quietly become the most cost-effective path to production-grade AI agents — and the math is now too compelling to ignore. Research from Amazon Web Services AI Labs shows that small-scale RL training using just 72 examples can push an open-source base model from 39% to 72% task completion on a complex personal assistant benchmark, at roughly 1–2% of what traditional large-scale training costs. This tutorial walks you through exactly how that works — the architecture, the training loop, the reward design, and the pitfalls to avoid.
What This Is
Efficient RL training for the agentic era is a methodology for customizing general-purpose large language models (LLMs) into high-performing, task-specific agents using a structured reinforcement learning loop — without the massive compute budgets historically required to close the gap with frontier proprietary models.
The core insight, documented in the NotebookLM strategic briefing synthesizing current research, is that the bottleneck in agentic AI is not the base model’s raw capabilities — it’s alignment to the specific environment the agent operates in. When you provide the model with a simulator it can interact with, verifiable signals about whether it succeeded or failed, and an optimizer (specifically Proximal Policy Optimization, or PPO) that can update its policy based on those signals, you get rapid, targeted adaptation.
This approach was popularized in the context of language model alignment via RLHF (Reinforcement Learning from Human Feedback) and RLAIF (Reinforcement Learning from AI Feedback). The agentic extension takes that same loop but replaces expensive, slow human feedback with automated, ground-truth-based verification — code that either compiles and runs correctly, API calls that either succeed or fail, files that either move to the right directory or don’t. Binary, verifiable, scalable.
The three-component architecture described in the AWS AI Labs research, as summarized in the research briefing, consists of:
- Online Simulator: Generates rollout trajectories — the full sequence of tool calls, observations, and actions the agent takes in an environment. The simulator wraps the real or emulated environment (a filesystem, an API, a database) and tracks everything the agent does.
- Verifiable Reward Functions: Rather than asking a human “was this response helpful?” at every step, rewards are calculated from ground truth. Did the agent complete the task? Did the code execute successfully? Exact match scores, binary task-completion flags, API response codes — these all serve as reward signals.
- Policy Updates via PPO: Proximal Policy Optimization updates the actor (the LLM being trained) based on the trajectories and rewards. PPO’s constraint on how much the policy can shift per step prevents catastrophic forgetting and keeps training stable.
This three-component pipeline is not novel in isolation — PPO and RL for LLMs have been studied extensively. What makes the current research significant is the scale at which it works: the research briefing cites examples where fewer than 72 training examples were sufficient to achieve near-proprietary performance on real-world agentic benchmarks.
The decentralized infrastructure layer that enables deploying and fine-tuning these models at scale — including Federated Learning (FL), model parallelism frameworks like DeepSpeed and Megatron-LM, and edge inference systems like TPI-LLM — forms the broader ecosystem this training methodology operates within, as detailed in the strategic briefing.
Why It Matters
The practical implications for teams building AI agents are significant, and they break down differently depending on your role.
For ML engineers and AI practitioners: The cost argument alone is compelling. According to the research briefing, achieving near-proprietary-model performance with small-scale RL training comes in at approximately 1% to 2% of what traditional large-scale training pipelines cost. That changes the build-vs-buy calculus for agent development entirely. Instead of defaulting to GPT-4o or Claude 3.5 Sonnet API calls because open-source alternatives couldn’t match performance, you now have a credible path to deploying fine-tuned open-source models that close much of the capability gap.
For AI product teams: The implication is faster iteration cycles. Because the training loop runs on automated verifiable rewards rather than human annotation pipelines, you can retrain on new task distributions quickly. Swap in a new environment simulator, define success criteria, run the RL loop, evaluate. Compare that to waiting for a human annotation batch to come back.
For enterprises with data privacy requirements: The Federated Learning integration documented in the briefing means you can run the RL training loop without centralizing sensitive data. Gradient updates rather than raw data move between nodes. This is particularly relevant in healthcare, finance, and any regulated industry where you need task-specific agents but cannot ship your proprietary data to a third-party training infrastructure.
What makes this different from standard fine-tuning: Supervised fine-tuning (SFT) teaches the model what outputs look like. RL teaches the model what success feels like. In agentic tasks — which involve multi-step tool use, dynamic environments, and long-horizon planning — SFT struggles because you cannot easily generate labeled demonstrations of every decision point. RL sidesteps this by learning from outcomes, not demonstrations. The research briefing notes that this is especially impactful for multi-turn agents operating across tool-use scenarios.
The other differentiation is in training data efficiency. The cited results in the briefing show dramatic improvements from tiny example counts (as few as 30–72 training tasks) because the RL loop generates its own training signal through environmental interaction — it creates many rollout trajectories per example rather than consuming a single labeled pair.
The Data
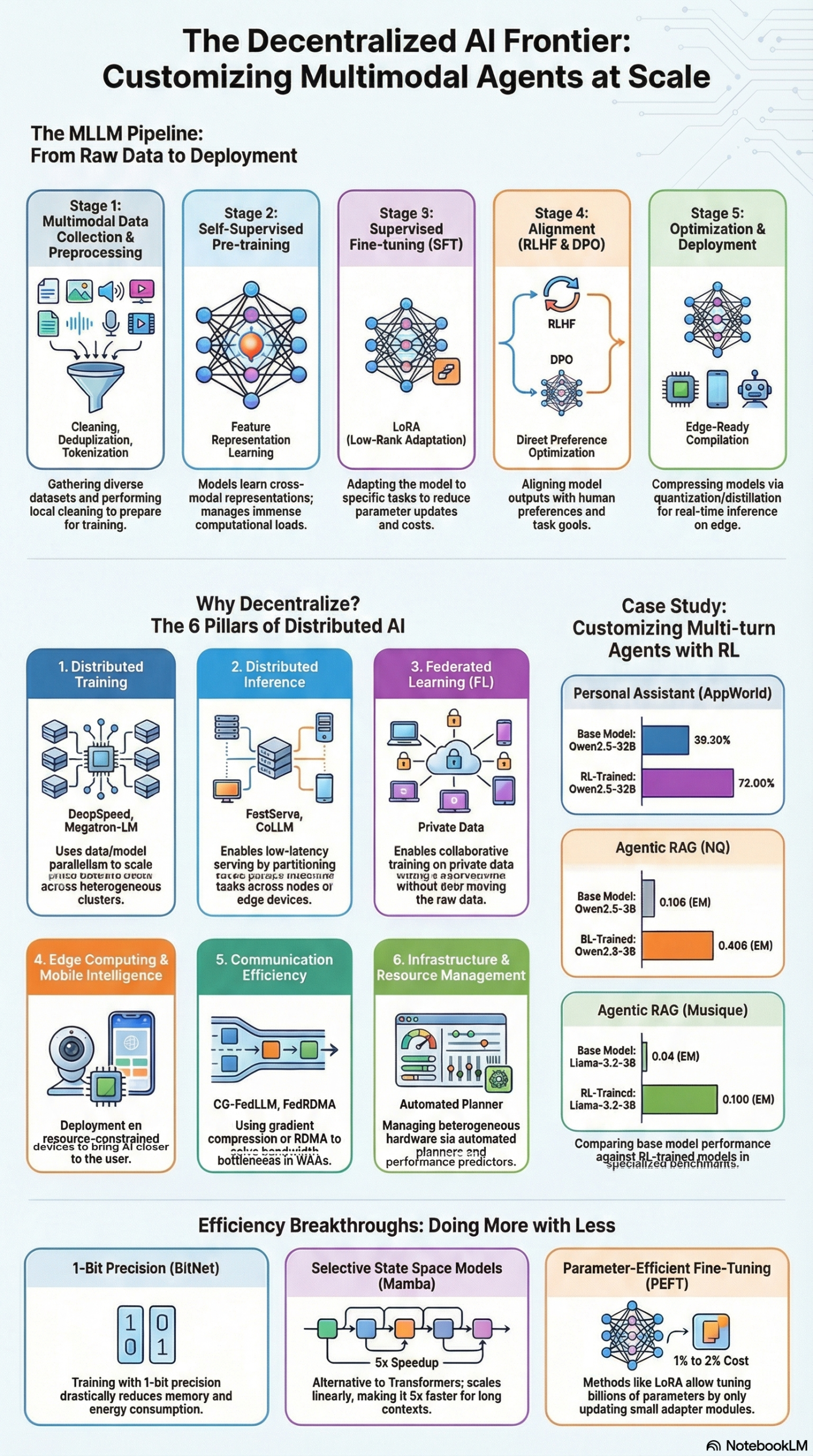
The performance gains documented in the research briefing are stark. Here’s the full benchmark comparison across tested use cases:
| Use Case | Dataset | Base Model | Base Performance | RL-Trained Performance | Metric | Gain |
|---|---|---|---|---|---|---|
| Personal Assistant | AppWorld | Qwen2.5-32B | 39.20% | 72.00% | Task Goal Completion | +83.7% relative |
| Agentic RAG | NQ (Natural Questions) | Qwen2.5-3B | 0.106 | 0.406 | Exact Match | +283% relative |
| Agentic RAG | Musique | Llama-3.2-3B | 0.04 | 0.10 | Exact Match | +150% relative |
Source: AWS AI Labs research, via NotebookLM Strategic Briefing
The AppWorld result is particularly telling. The AppWorld benchmark tests agents on completing real-world smartphone app tasks — the kind of multi-step, multi-tool workflows that personal assistant agents actually need to handle. Qwen2.5-32B is a capable base model, but at 39% it’s nowhere near production-useful for this benchmark. At 72%, with just 72 RL training examples, it crosses a threshold where deployment becomes plausible.
The Agentic RAG results on NQ are even more dramatic in percentage terms (a 283% relative improvement), but the absolute numbers (0.106 → 0.406 exact match) also reveal something important: RL cannot overcome fundamental reasoning limits in very small models. Llama-3.2-3B on Musique improved from 0.04 to 0.10 — meaningful progress, but still low absolute performance. The research briefing is explicit about this ceiling: “RL cannot overcome the fundamental reasoning floors of very small models. For these models, distillation from larger models is more effective than scaling RL.”
A key secondary finding from the briefing: larger base models get disproportionately more benefit from RL training. The reasoning is that stronger base models generate higher-quality rollout trajectories during training, which creates a positive feedback loop — better rollouts produce more informative reward signals, which produce better policy updates.
Step-by-Step Tutorial: Building an Efficient RL Training Pipeline for an AI Agent
This tutorial builds a working RL training loop for a custom agentic task. We’ll use the three-component architecture described in the research briefing: online simulator, verifiable rewards, and PPO-based policy updates.
Prerequisites
- Python 3.10+
- A base LLM (Qwen2.5-7B, Llama-3.2-7B, or equivalent — minimum 7B recommended for meaningful RL gains)
- TRL library (HuggingFace’s RL for LLMs library, includes PPO implementation)
- vLLM or equivalent for fast inference during rollout generation
- An environment you can simulate (filesystem, API sandbox, database, etc.)
- GPU compute: minimum 1x A100 80GB for 7B models; multi-GPU recommended for 32B+
Phase 1: Define Your Agent Task and Environment
Before writing a single line of training code, you need crystal-clear task specification. This is where most RL training projects fail — vague task definitions produce vague reward signals, which produce agents that game the reward rather than solving the actual problem.
Step 1: Write a formal task specification. Define the task as: (a) what inputs the agent receives, (b) what tools it has access to, (c) what a successful completion looks like. For example, if you’re building a file management agent:
Task: Move all files matching pattern X from directory A to directory B,
then update a manifest.json with the list of moved files.
Input: Starting directory state + task description in natural language
Tools: [list_files, move_file, read_file, write_file]
Success: All matching files in directory B + manifest.json updated correctly
Step 2: Build the environment simulator. Your simulator needs to: reset to a clean initial state between rollouts, execute tool calls the agent makes, return observations (tool outputs), and compute a final success score. Use Python classes to encapsulate this:
class FileManagementEnv:
def __init__(self, task_config):
self.task_config = task_config
self.state = None
def reset(self):
"""Reset to initial state, return initial observation."""
self.state = copy.deepcopy(self.task_config['initial_state'])
return self._get_observation()
def step(self, tool_name: str, tool_args: dict):
"""Execute a tool call, return (observation, done, info)."""
result = self._execute_tool(tool_name, tool_args)
done = self._check_completion()
reward = self._compute_reward() if done else 0.0
return result, done, reward
def _compute_reward(self) -> float:
"""Binary verifiable reward — 1.0 for success, 0.0 for failure."""
files_correct = self._verify_file_locations()
manifest_correct = self._verify_manifest()
return 1.0 if (files_correct and manifest_correct) else 0.0
The key design principle here, per the research briefing: make your reward binary and verifiable. Continuous rewards introduce gradient noise; verifiable binary signals are clean.
Phase 2: Generate Rollout Trajectories
Step 3: Set up the rollout generation loop. The online simulator generates full trajectories — sequences of (observation, action, reward) tuples — by running the current policy against the environment. This is where vLLM earns its place: you need fast inference to generate enough rollouts to make PPO updates meaningful.
from vllm import LLM, SamplingParams
def generate_rollouts(model, tokenizer, env, task_batch, n_rollouts=4):
"""Generate rollout trajectories for a batch of tasks."""
trajectories = []
sampling_params = SamplingParams(
temperature=0.7,
max_tokens=512,
stop=["<|tool_end|>", "<|eot_id|>"]
)
for task in task_batch:
for _ in range(n_rollouts):
obs = env.reset()
trajectory = []
done = False
while not done:
# Format prompt with current observation and tool definitions
prompt = format_agent_prompt(obs, task['tools'], task['description'])
# Sample action from current policy
output = model.generate([prompt], sampling_params)[0]
action = parse_tool_call(output.outputs[0].text)
# Step environment
obs, done, reward = env.step(action['tool'], action['args'])
trajectory.append({
'prompt': prompt,
'response': output.outputs[0].text,
'reward': reward if done else 0.0
})
trajectories.append(trajectory)
return trajectories
Step 4: Strategic task selection. The research briefing documents an important optimization: prioritize harder tasks in your training batch. The reasoning is asymmetric transfer — if the agent learns to solve hard tasks, the learning generalizes to easier tasks for free. If you train only on easy tasks, performance on hard tasks stays flat. Implement a difficulty-aware sampler:
def difficulty_aware_sampler(task_pool, batch_size, current_policy_scores):
"""Sample tasks weighted toward difficulty (low current success rate)."""
difficulties = {
task_id: 1.0 - current_policy_scores.get(task_id, 0.5)
for task_id in task_pool
}
weights = list(difficulties.values())
selected = random.choices(
list(task_pool.keys()),
weights=weights,
k=batch_size
)
return selected
Phase 3: Policy Update with PPO
Step 5: Configure PPO with TRL. HuggingFace’s TRL library provides a PPO trainer that works with standard HuggingFace models. The key hyperparameters for agentic RL:
from trl import PPOTrainer, PPOConfig
from transformers import AutoModelForCausalLM, AutoTokenizer
ppo_config = PPOConfig(
model_name="Qwen/Qwen2.5-7B-Instruct",
learning_rate=1e-5,
batch_size=32,
mini_batch_size=4,
gradient_accumulation_steps=8,
ppo_epochs=4, # Inner epochs per rollout batch
cliprange=0.2, # PPO clip parameter — keeps policy updates bounded
vf_coef=0.1, # Value function coefficient
max_grad_norm=0.5, # Gradient clipping
kl_penalty="kl", # KL divergence penalty against reference policy
init_kl_coef=0.05, # Initial KL coefficient
target_kl=0.1, # Target KL — adaptive coefficient adjusts to hit this
)
model = AutoModelForCausalLM.from_pretrained(ppo_config.model_name)
tokenizer = AutoTokenizer.from_pretrained(ppo_config.model_name)
ppo_trainer = PPOTrainer(ppo_config, model, ref_model=None, tokenizer=tokenizer)
The kl_penalty and target_kl parameters are critical for preventing the agent from drifting too far from its base capabilities — a problem called reward hacking, where the model finds ways to score high rewards while losing general coherence. The KL penalty keeps the updated policy from straying too far from the reference policy (the original base model).
Step 6: The training loop. With trajectories generated and PPO configured, the training loop ties everything together:
for epoch in range(num_epochs):
# Sample a batch of tasks, weighted toward harder examples
task_batch = difficulty_aware_sampler(task_pool, batch_size=8,
current_policy_scores=eval_scores)
# Generate rollouts with current policy
trajectories = generate_rollouts(model, tokenizer, env, task_batch)
# Flatten trajectories into PPO training format
queries, responses, rewards = [], [], []
for traj in trajectories:
for step in traj:
queries.append(tokenizer(step['prompt'], return_tensors='pt').input_ids)
responses.append(tokenizer(step['response'], return_tensors='pt').input_ids)
rewards.append(torch.tensor(step['reward']))
# PPO policy update
stats = ppo_trainer.step(queries, responses, rewards)
# Evaluate periodically
if epoch % eval_interval == 0:
eval_scores = evaluate_policy(model, tokenizer, eval_task_pool, env)
print(f"Epoch {epoch}: Mean task completion = {np.mean(list(eval_scores.values())):.3f}")
Phase 4: Infrastructure and Scaling
Step 7: Deploy with distributed training for large models. For models at the 32B parameter scale (like Qwen2.5-32B used in the AppWorld benchmark from the research briefing), you’ll need tensor parallelism. DeepSpeed’s ZeRO-3 or Megatron-LM’s model parallelism are the standard options. A minimal DeepSpeed configuration:
{
"zero_optimization": {
"stage": 3,
"offload_optimizer": {"device": "cpu"},
"offload_param": {"device": "cpu"},
"overlap_comm": true,
"contiguous_gradients": true
},
"gradient_accumulation_steps": 8,
"bf16": {"enabled": true},
"train_micro_batch_size_per_gpu": 1
}
The overlap_comm: true flag is particularly important — it implements communication overlapping (similar to the ACCO framework cited in the briefing), starting data transfer as soon as partial gradient computation is ready rather than waiting for the full batch.
Step 8: Use PEFT/LoRA to reduce training cost. For deployments where full-parameter RL training is cost-prohibitive, LoRA (Low-Rank Adaptation) reduces trainable parameters by 10–100x. The research briefing notes that PEFT/LoRA can reduce transmitted data by up to 10x in federated settings, but the same efficiency gains apply to centralized training compute:
from peft import get_peft_model, LoraConfig, TaskType
lora_config = LoraConfig(
r=16,
lora_alpha=32,
target_modules=["q_proj", "v_proj", "k_proj", "o_proj"],
lora_dropout=0.05,
bias="none",
task_type=TaskType.CAUSAL_LM
)
model = get_peft_model(model, lora_config)
model.print_trainable_parameters()
# Typical output: trainable params: 41,943,040 || all params: 7,242,977,280 || trainable%: 0.579
Expected Outcomes
Following this pipeline with a 7B+ base model and 50–100 task examples:
– Expect 40–80% relative improvement in task completion rate within 3–5 training epochs
– Training time on a single A100 (for a 7B model with LoRA): 2–6 hours depending on rollout count
– Costs drop dramatically versus fine-tuning on large supervised datasets — per the research briefing, approximately 1–2% of traditional training costs
Real-World Use Cases
Use Case 1: Enterprise Personal Assistant Agent
Scenario: An enterprise software company wants to deploy an internal AI assistant that can navigate their proprietary SaaS tooling — scheduling across Salesforce, Workday, and Slack simultaneously. Off-the-shelf models fail at multi-app coordination. API costs for frontier models are prohibitive at scale.
Implementation: Build an AppWorld-style simulator that emulates the company’s app APIs (mock endpoints returning realistic data). Define success as: correct calendar event created + Slack confirmation sent + Workday timesheet updated. Run RL training on Qwen2.5-32B with LoRA, using 50–100 representative task scenarios. Per the research briefing, this approach achieved 72% task goal completion on AppWorld — a production-viable threshold.
Expected Outcome: A fine-tuned model deployable on-premises or in a private cloud, with per-query costs 5–10x lower than frontier API calls and no data egress to third-party providers.
Use Case 2: Agentic RAG for Technical Support
Scenario: A developer tools company wants an agent that answers complex technical questions by searching documentation, executing code snippets to verify answers, and synthesizing multi-step explanations. Standard RAG returns single-document retrievals; the agent needs to reason across multiple sources.
Implementation: Use the Agentic RAG setup from the research briefing — train a Qwen2.5-3B model with RL using exact match on the NQ (Natural Questions) dataset as the reward signal. The agent learns to iteratively retrieve, synthesize, and verify answers. The briefing shows exact match improving from 0.106 to 0.406 — nearly 4x improvement.
Expected Outcome: A compact, fast 3B model capable of multi-hop reasoning across documentation corpora, deployable on modest GPU hardware (even a single A10).
Use Case 3: Code Generation and Execution Agent
Scenario: A data engineering team wants an AI agent that writes and debugs ETL pipeline code. The agent needs to generate Python, execute it in a sandboxed environment, interpret error messages, and iterate until the code runs correctly.
Implementation: The code execution environment is the perfect verifiable reward scenario — code either runs and produces correct output, or it doesn’t. Build a Docker-based sandbox that executes agent-generated code and returns stdout/stderr. Reward = 1.0 if output matches expected, 0.0 otherwise. This is exactly the binary verification model described in the research briefing‘s actionable insights: “focus on environments where success is binary and verifiable.”
Expected Outcome: An agent that iteratively self-debugs within an episode, achieving significantly higher pass@1 rates than prompted base models on real ETL tasks.
Use Case 4: Federated Agent Training for Multi-Organization Deployments
Scenario: A healthcare consortium wants a shared clinical documentation agent trained on data from five hospital systems. Data cannot leave each hospital due to HIPAA. Standard centralized fine-tuning is off the table.
Implementation: Deploy Federated Instruction Tuning (FedIT) as described in the research briefing. Each hospital runs local RL training loops using their own patient interaction data (fully de-identified at the prompt level). Only LoRA adapter weights — not raw data or full model gradients — are transmitted to the aggregation server. The briefing documents that PEFT/LoRA reduces transmitted data by up to 10x versus full-parameter updates.
Expected Outcome: A shared clinical documentation agent with performance competitive with centrally-trained models, zero data centralization, and a compliance-auditable training provenance chain.
Use Case 5: Marketing Automation Agent
Scenario: A digital marketing agency wants an agent that autonomously plans, writes, and schedules multi-channel content campaigns. The agent must coordinate across a CMS, social scheduling tool, and analytics dashboard.
Implementation: Build an environment simulator wrapping the agency’s tool APIs. Define task success as: campaign drafted + scheduled within spec + analytics tracking configured. Use RL with binary task-completion rewards. Start with a 7B model and LoRA fine-tuning — the research briefing confirms that meaningful RL gains are achievable even at this parameter scale.
Expected Outcome: A custom agent tuned to the agency’s specific workflow terminology, tool schemas, and brand guidelines — performing far better than generic prompted models on the same tasks.
Common Pitfalls
1. Using Continuous Rewards Instead of Verifiable Binary Ones
What goes wrong: You design a reward function that gives partial credit (0.0–1.0) for approximate task completion. The agent learns to exploit the partial-credit structure rather than solving the task — maximizing a “looks like it’s trying” score instead of actually completing work.
Why: Continuous reward surfaces have many local maxima that don’t correspond to real task success.
How to avoid: Per the research briefing, anchor rewards to ground truth verification — code execution results, exact match scores, API response codes. If you can’t make it binary, at least ensure the 1.0 reward requires full task completion.
2. Training on Too-Easy Tasks
What goes wrong: Your agent quickly achieves high reward on your training set but fails on real-world variants.
Why: The research briefing explicitly notes that training on easy tasks limits transfer learning. Easy-task policies don’t generalize.
How to avoid: Implement difficulty-weighted sampling from the start. Prioritize tasks where the current policy succeeds less than 60% of the time.
3. Ignoring KL Divergence Penalty
What goes wrong: The agent achieves high task rewards but starts producing incoherent outputs, hallucinating tool names, or losing instruction-following capability.
Why: Unconstrained PPO can shift the policy so far from the base model that general language capabilities degrade — a form of catastrophic forgetting.
How to avoid: Always set a KL penalty against the reference policy. Use adaptive KL coefficients (TRL’s target_kl parameter) to automatically balance task performance against policy drift.
4. Deploying RL on Models Too Small for the Task
What goes wrong: You fine-tune a 3B model with RL and see minimal improvement on complex reasoning tasks.
Why: The research briefing is direct: “RL cannot overcome the fundamental reasoning floors of very small models.” The base model needs sufficient reasoning capability to generate useful rollouts during training.
How to avoid: For complex multi-step tasks, use at least a 7B model. If 3B is a hard constraint, consider distillation from a larger model first, then RL fine-tuning.
5. Federated Training Without Security Hardening
What goes wrong: Malicious clients in a Federated Learning setup inject safety-unaligned data through the gradient update mechanism.
Why: As documented in the research briefing, FL is vulnerable to safety attacks where malicious clients corrupt the global model during Federated Instruction Tuning.
How to avoid: Implement gradient anomaly detection, clip extreme gradient updates from individual clients, and run periodic safety evaluation on the global model.
Expert Tips
1. Run multiple rollouts per task, not multiple tasks. During rollout generation, sample 4–8 trajectories per task rather than covering many unique tasks with single rollouts. This gives PPO a richer signal about the reward landscape for each task and reduces variance in your gradient estimates.
2. Use asymmetric KL penalties in late training. Once your policy is performing well, the forward KL (policy → reference) and reverse KL (reference → policy) behave differently. Forward KL prevents mode collapse; reverse KL prevents the policy from assigning zero probability to reference behaviors. In late training stages, tuning the direction of your KL penalty can squeeze out additional performance gains.
3. Instrument your simulator for rollout analysis. Before scaling RL training, spend time analyzing what your rollouts actually look like. Are tool calls syntactically valid? Is the agent getting stuck in loops? Is it consistently failing at step 3 of a 5-step task? The research briefing emphasizes that higher-quality rollouts from better base models create positive feedback loops — poor rollout quality caps your ceiling before PPO even runs.
4. Layer LoRA ranks for different task types. If you’re training on a mix of task types (file management + API calls + code generation), consider using separate LoRA adapters with different ranks for different task heads, then merging them using LoRA composition techniques. This prevents interference between task-specific gradient signals.
5. Evaluate on a held-out difficulty tier. Maintain a test set of tasks one difficulty tier above your hardest training tasks. If your training tasks max out at 5-step tool chains, evaluate on 7-step chains. This catches overfitting to training task distributions early and signals when you need to expand your task pool.
FAQ
Q: How many training examples do I actually need for meaningful RL improvement?
According to the research briefing, as few as 30–72 examples have demonstrated significant performance gains in documented experiments. The AppWorld benchmark result (39% → 72% task completion) used 72 examples. That said, this is highly task-dependent — simpler, well-defined tasks need fewer; complex, open-ended ones may need more.
Q: Should I use PPO or a simpler algorithm like REINFORCE?
PPO is the recommended choice for agentic RL at this scale. REINFORCE has high gradient variance and can destabilize training on long-horizon tasks. PPO’s clipped objective function bounds policy updates and keeps training stable across the multi-step trajectories typical in agentic settings. The research briefing specifically references PPO as the policy update mechanism in the documented AWS AI Labs research.
Q: Can I run this without a GPU cluster — say, on a single A100?
For 7B models with LoRA, yes. A single A100 80GB can handle rollout generation and PPO updates for a 7B model in LoRA mode. For 32B models, you’ll need at least 2–4 A100s with tensor parallelism. The research briefing notes that TPI-LLM enables 70B-scale inference on low-resource edge devices using sliding window memory schedulers, though that’s inference-optimized, not training.
Q: What’s the difference between RLHF and the agentic RL approach described here?
RLHF trains a reward model from human preference annotations, then optimizes the LLM against that learned reward. Agentic RL replaces the learned reward model with a ground-truth verifiable environment — the reward comes from whether the agent actually completed the task, not from a model’s prediction of whether a human would prefer this response. This eliminates the reward model training step entirely and makes the signal much cleaner for task-specific agent customization.
Q: How do I handle tasks where success isn’t cleanly binary?
This is the hardest design challenge in agentic RL. The research briefing strongly recommends structuring tasks around verifiable outcomes, but acknowledges this isn’t always possible. Practical options: decompose complex tasks into sub-tasks with binary checkpoints, use LLM-as-judge for final evaluation (with caveats about consistency), or use exact match metrics on structured outputs (JSON, SQL, code). Avoid fuzzy string similarity scores as primary rewards — they produce reward hacking.
Bottom Line
Efficient RL training for agentic AI is not a research curiosity — it’s a production-viable path to deploying high-performing custom agents at dramatically lower cost than traditional alternatives. The documented results from AWS AI Labs research, synthesized in the NotebookLM strategic briefing, show that 1–2% of traditional training cost can close most of the gap between open-source models and proprietary frontier systems on specific agentic benchmarks. The architecture is straightforward: an online simulator, verifiable binary rewards, and PPO policy updates — and the tooling (TRL, vLLM, LoRA) is mature and accessible. The key constraint is choosing the right base model for your task complexity — models below 7B parameters often hit reasoning floors that RL cannot lift. As the tooling continues to mature and the cost of RL training continues to fall, this methodology will become the default approach for teams building specialized agents at scale.









0 Comments